Requirements and recommendations🔗
Functionality limitations
Warning
After updating Eocortex from version 3.3 and lower to version 3.3 and higher, the Search for objects module will not be able to search for objects for the period preceding the update. This is due to the database change in version 3.4.
Hardware and software
Warning
Eocortex Neural Networks package must be installed before it will be possible to use neural networks-based features of the module.
The following equipment is required to use this neural network-based module:
A processor that supports AVX instructions;
An NVIDIA video card (GPU) with the computation capacity index of at least 6.5 and with at least 4 Gb of memory; the parameters and performance of the video card must be similar or better than those of NVIDIA GTX 1650 Ti model;
Version of the video card driver at least 460;
Swap file at least half of the total RAM size.
If the package will be installed on a virtual machine, it may additionally be required to:
Enable support for AVX instructions in the guest machine settings;
Use GRID drivers for GPU virtualization.
Warning
Eocortex must use video cards selected for running neural networks in monopoly mode. It is not allowed to use such card for other applications or tasks that consume GPU resources, including for displaying video. Simultaneous use of a video card for several tasks may lead to incorrect system operation: from analytics performance degradation to server instability.
Warning
Simultaneous execution of tasks of video displaying and analysis with the Face Recognition (Complete) or Unique Visitor Counting modules working on the ** Eocortex Neural Networks Standard** package can cause significant lags of face recognition processes when using graphics cards of GTX 10XX and GTX 16XX series with 4 GB of video memory or less. It is recommended to use dedicated graphics cards for these tasks.
Warning
The neural network works with the 64-bit version of Eocortex only.
Warning
When upgrading Eocortex to another version, it is necessary to also upgrade the Eocortex Neural Networks package to the corresponding version.
Use of computing resources
The table below shows the allowed number of cameras for different video streams and server configurations without displaying cameras on the same device.
CPU |
GPU |
RAM, GB |
Number of cameras |
|---|---|---|---|
Stream: 2 Mpix, 25 fps |
|||
Intel® Core™ i5-2400 |
NVIDIA GeForce GTX 1050 Ti |
8 |
5 |
Intel® Core™ i7-2600 |
NVIDIA GeForce GTX 1060 |
8 |
9 |
Intel® Core™ i7-7700 |
NVIDIA GeForce RTX 2070 |
8 |
13 |
Intel® Core™ i9-9900 |
NVIDIA GeForce RTX 2080 |
12 |
20 |
Stream: 1 Mpix, 25 fps |
|||
Intel® Core™ i5-2400 |
NVIDIA GeForce GTX 1050 Ti |
8 |
8 |
Video stream
The frame rate must not be lower than 10 frames per second;
The optimal resolution is HD or FullHD.
Image
Lighting in the frame should be uniform and constant.
If the camera is installed in front of a bright light source (the sun behind an entrance door, etc.), it is required to adjust the exposure (or brightness) to ensure that the objects in the frame have a natural color (not overexposed or darkened). In this case, it is permissible for the background to be overexposed.
The image must be in color.
There must be no significant compression artefacts.
The compression quality must not be lower than average.
The object must be seen from a suitable angle, at which it will be clearly distinguishable from the background and plainly visible when observed by the human eye.
For searching for people:
A strong lateral light source (sunlight from a window) is not permitted because in this case one half of the person will be overexposed and the other half will be too dark.
Scene and camera position
The frame must not contain mirrored surfaces that give reflections: glasses, mirrors, etc.
It is allowed to place the camera overhead. The tilt angle of the camera should not exceed 45 ° from the horizontal line.
For searching for people:
People must be visible at full height.
For searching for vehicles:
Installing the camera at an angle to the axis of movement of the vehicles provides the most advantageous perspective.
Module’s performance
The accuracy of searching for people using colors is about 70%.
The accuracy of searching for people using samples is about 80%.
The accuracy of searching for vehicles using colors and samples is from 50 to 70%, depending on the perspective of the vehicle and lighting. Glare and flare from headlights significantly reduce the accuracy of color definition.
Minimum requirements for searching vehicles by color:
The vehicle must be of single color, without multicolored stickers or the like.
The vehicle must be captured during daylight hours and in good weather.
The exposure and contrast on the camera must be adjusted in such a way that the color of the subject can be unambiguously determined by the human eye.
The body of the vehicle must not be light-struck by headlights or other reflections of light, including sunlight.
The angle at which the vehicle was captured must allow to correctly determine the dominant color of the object (for example, if the car is seen from behind, the bumper is painted in a dark color and the rear window is tinted, the color of the car may be detected as black).
Below are the examples of favorable and unfavorable angles for determining the type of vehicle. The better the perspective, the higher the accuracy of determining the type of a passing vehicle. On average, under good conditions, the accuracy of determining the type of vehicle is about 80%.
Favorable perspective |
Unfavorable perspective |
|---|---|
|
|
|
|
|
|






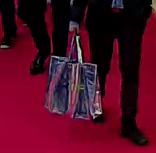
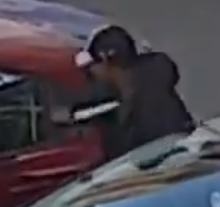
The accuracy of searching for other objects significantly depends on the quality of the image, on the size of the object in the frame, as well as on the perspective from which this object is seen. Under suitable conditions, the accuracy of searching for other objects can reach 40% to 60%, depending on the degree of visibility of the object in the frame and its size (for example, a partially hidden weapon or a suitcase hidden behind a corner will be much less likely to be detected than clearly distinguishable objects of the same type). Moreover, this category of objects is characterized by a greater number of false triggerings than others.
Below are the examples of favorable and unfavorable angles for searching for other objects.
Favorable perspective |
Unfavorable perspective |
|---|---|
|
|
|
|